The locomotive Re 465
Gabriel MOISA
Technical University of Cluj-Napoca
Abstract
In paper is described the force schema of locomotives Re 460 and Re 465, the function, the parameters who works and the differences between this, as well as the each advantages and disadvantages.
Is presented in short the novelty that introduces the locomotive Re 465 in electric energy economises.
For final is indicating, such as, the novelty of locomotive Re 465 command-control system and the principle thereupon action.
At last, was insisting under the mode that can be interchanged these locomotives with one of other type.
Keywords
Command systems, Control systems, European railways.
1. Introduction
The locomotive Re 465 (of railway Lötschberg BLS) represent a development of locomotive Re 460, who was realised and concept after “Loco 2000”.
Re 465 are locomotives by line universals, of the powerfully in world, drives by converter and command by high-tension autotransformer with plots system.
Are their capable to support a towed load by 650 t under the ramps by 27 %o and accelerate in mean time until 100 km/h.
In their concept is look for simplify the force circuit and the command-control system, resulting implicit a reduced cost.
2. Technical Specifications
The locomotives Re 465 were put in exploitation from 1995 year on the spring and represent a development of locomotives Re 460 who were realised in succeed of concept “Loco 2000” of Switzerland federal railways (CFF).
In case of Re 465, each of traction motor posed a proper converter. For locomotive Re 460 converter, was chosen a three points montage with circuit intermediate three-pole by 3500 V.
By this, the blocked GTO thyristors and power diodes are not solicited than by half-tension by 1750 V.
Contra, for BLS locomotives is using a two-point montage, where all continue tension of intermediate circuit by 2800 V is applied to power semiconductors in blocked status.
Both types of locomotives use GTO thyristors with blockage tension by 4, 5 kV and a residual current by 2, 5 kA.
Some recent progress permit to use GTO thyristors at a continue tension by 2800 V in blockage status, also the tension peaks by short duration who were produced in commutation process.
Another important point results in utilisation of a new protection montage with small losses. The power semiconductors of the two locomotives types use, practically, some current intensity.
The Re 465 locomotive has the maxim power at joint by 7000 kW, the maxim torque 320 kN, the axle power in continuum regime 6400 kW, the axle torque in continuum regime 242 kN∙m at speed by 93 km/h.
The transformer has traction power in continuum regime by 4000 kVA, maxim traction power by 9195 kVA; motors with six pairs of poles; medium tact frequency of traction converters by 250 Hz.
The Re 460 locomotive has: the maxim power at joint by 6100 kW, the maxim torque by 300 kN∙m, the axle power in continuum regime by 4800 kW, the axle torque in continuum regime by 194 kN∙m, at a speed by 88 km/h.
The transformer has traction power in continuum regime by 4500 kVA, the maxim traction power by 8360 kVA; motors with four pairs of poles; the medium tact frequency of traction converters by 143 Hz.
Grace of a better utilisation of blockage tension of GTO thyristors, in case of Re 465 was made possible the increase of locomotive power. All the same, that imposes the decreasing of tension by intermediate circuit from 3500 to 2800 V.
In this case must be accepted the inconveniences of lower tension by intermediate circuit. In spite of higher power, the numbers of semiconductors elements are much lower: 108 in case Re 465, than 148 from Re 460.
The motor selective supply allows so each torque optimum regulation, also the axle selective command of anti-sliding device.
The decentralised command-control system MICAS-S2 was permits the realisation of other fruity newness in case of Re 465. It knows from experience that medium request torque on voyage no reach than 10-20 % from available torque of a locomotive.
Therefore, in case of values finding to be less, purely two traction motors by a bogie will provide traction or braking torque. The others motors by a bogie wont be supply.
The intermediate circuit will be solicited all the time, but the auxiliary services power of this bogie will be extreme reduced. This economise possibility is, therefore, very important.
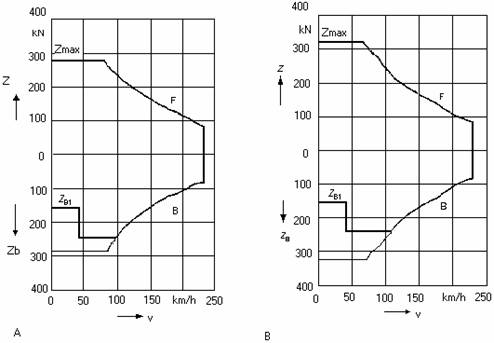
(F-traction, B-braking, v-speed, Z- axle torque, Zmax - starting torque
ZB- braking torque, ZB1- maxim braking torque)
Figure no 1. The torque-speed characteristics of (a) Re 460 and (b) Re 465
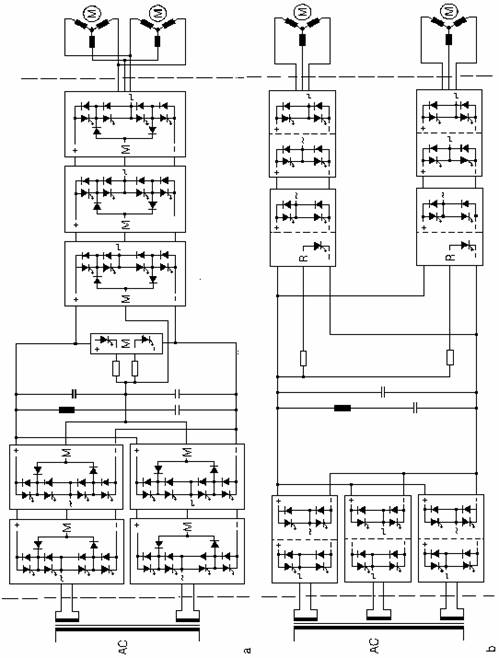
Figure no 2. The principal electric circuit of (a) Re 460 and (b) Re 465
The commutation “a bogie-two bogies” is automaton effectuate, according of torque request.
In case of Re 465 is using the multiple commands, by means of conventional metallic cables system, where the transmission is founded by coding by frequency shifting (Frequency-Shift-Keying).
For redundancy motives, the train bus is doubled. They use twice two EP command cables by nine poles, for electric-pneumatic braking command. The transmission data speed of train bus is 9.5 Kb/sec, many losses than the optic fibre transmission, but sufficiency.
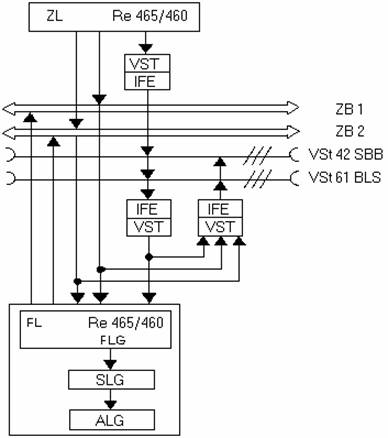
Figure no 3. Data transmission in multiple mixed commands
to locomotive Re465
Legend for figure 3:
ZL - train command-control level;
VST - multiple command;
IFE - interface store;
ZB - train control bus;
VSt - conduct multiple command;
FL - vehicle command-control level;
FLG - vehicle command-control apparatus;
SLG - converter command-control apparatus;
ALG - drive command-control apparatus;
To each of locomotives, the train bus is connecting with vehicle bus by means of interface and by control unity of train bus.
In function of necessity, a train may be conduct or changed with a locomotive Re 465, Re 460 or a conventional continuum current locomotive. The high adaptation aptitudes of MICAS-S2 electronic system satisfy this entire mission.
All the same, when the mechanic is finding to a locomotive of older conception, he cannot call than knowledge and functions limit. In case of locomotives with motors series, the MICAS-S2 system calculate permanently the momentary function point in inner of characteristic speed/torque curves, could be determinate finally the momentary request position for auto-transformer with plots system or for command by shifting of ignition angle.
3. Conclusions
The performances and the particular cases meet in concept of this types by locomotives, presented so in paper content so in the introductory part, are in measure to attract the attention of researchers and designers who propose them to choose a compromise between performances, sundries and manual labour.
References
[1] Hans-Peter Eggenberger, Peter Gerber: Revue ABB 6/7 1995.
[2] Gerber, P.: Die Lokomotiven Re 465 001-008 der Lötschbergbahn, ABB Systemes de Transport SA.
[3] Lütscher, J.;Schläpfer, P.: “Loc 2000” – une nouvelle génération de locomotives polyvalentes. Revue ABB 10/92.